








- 故障電弧探測器
- 智能微型斷路器
- 智慧消防云
- 環(huán)保數(shù)采儀
- 弧光保護裝置
- 無線預(yù)付費電表
- 智能網(wǎng)關(guān)
- 余壓控制器
- 新能源-電瓶車充電樁
- 基站電表
- 銀行**用電
- 重點用能能耗
- 灌溉表
- 云平臺系列
- 管廊產(chǎn)品
- Acrel-BUS智能照明控制...
- 遠程預(yù)付費電能管理系統(tǒng)
- AEW無線計量模塊
- 儲能變流器
- **用電管理云平臺
- 電氣綜合監(jiān)控
- 變電所運維云平臺
- 自復(fù)式過欠壓保護器
- 電能質(zhì)量治理
- 多用戶計量箱
- 高校宿舍電能管理系統(tǒng)
- 工業(yè)企業(yè)電能管理系統(tǒng)
- 系統(tǒng)集成
- 電氣**
- 電能管理
- 電量傳感器
- 電力監(jiān)控與保護
- AKH-0.66系列電流互感器
淺談三相異步電動機過負荷保護的配置及定值設(shè)置分析
張娟
安科瑞電氣股份有限公司 上海嘉定 201801
摘要:以電動機過負荷保護動作造成機組停運事件為例,分析現(xiàn)場普遍存在的電動機過負荷保護偏重保護電動機**,未充分釋放電動機過負荷能力,對系統(tǒng)造成的危害。研究電動機過負荷保護配置及過負荷保護定值設(shè)置,提出改進建議及有效措施,在保證電動機**的基礎(chǔ)上,防止重要電動機過早切除導(dǎo)致經(jīng)濟損失。
關(guān)鍵詞:電動機;過負荷;保護配置及定值設(shè)置
1三相異步電動機定子繞組過負荷的原因及危害
導(dǎo)致三相異步電動機定子繞組過負荷的原因是多方面的:一是電動機實際負載增加,如過度加載導(dǎo)致電動機超額定電流運行,或軸承損壞等設(shè)備異常導(dǎo)致負載增加;二是電源異常導(dǎo)致電動機超額定電流運行,電壓、頻率降低等。長時間的定子繞組過負荷,主要的危害是導(dǎo)致定子繞組線圈過熱、絕緣受損、電動機損壞。定子線圈的溫升與過電流倍數(shù)及過電流持續(xù)時間有關(guān),過電流倍數(shù)越大則溫升速率越大,過電流持續(xù)時間越長則線圈溫升越高。電動機的過負荷保護定值應(yīng)根據(jù)這一特性設(shè)定。
2常規(guī)三相異步電動機定子繞組過負荷的保護配置及定值選取
GB/T14285-2006《繼電保護和**自動裝置技術(shù)規(guī)程》及DL/T5153-2014《火力發(fā)電廠廠用電設(shè)計技術(shù)規(guī)程》對高壓電動機過負荷保護的配置要求:對于運行過程中易發(fā)生過負荷的電動機,保護應(yīng)根據(jù)負荷特性,帶時限動作于信號或跳閘;對于啟動或自啟動困難,需要防止啟動或自啟動時間過長的電動機,保護動作于跳閘。
目前,針對電動機定子繞組過負荷,微機型電動機綜合保護通常配置長啟動保護、堵轉(zhuǎn)保護、過負荷保護。其中長啟動保護用于保護電動機啟動困難,或啟動時間過長工況,采用定時限,電流動作定值取1.5-~2.0倍電動機額定電流,動作時間按躲過電動機正常啟動時間整定,動作于跳閘。堵轉(zhuǎn)保護用于保護電動機運行中堵轉(zhuǎn)工況,采用定時限,電流動作定值取1.3~2.0倍電動機額定電流,動作時間按躲過電動機啟動或自啟動時間整定,動作于跳閘。過負荷保護定值按躲過電動機額定電流計算,動作時間按躲過啟動時間整定,動作于信號或跳閘。
3定子繞組過負荷保護動作案例分析
下面介紹3起電動機過負荷保護動作引起的機組非計劃停運事件,事件造成直接、間接經(jīng)濟損失超過100萬元。
(1)案例1:某600MW火電機組增壓風(fēng)機過負荷跳閘導(dǎo)致機組非停。2017年2月21日,某600MW火電機組按調(diào)度曲線加載負荷。當(dāng)日9:19,機組負荷達到489.7MW,增壓風(fēng)機電流為568.2A,指令為86%;當(dāng)日9:45:41,機組負荷達到500MW,增壓風(fēng)機電流指令為100%,過負荷保護動作,動作電流為696A,增壓風(fēng)機跳閘,鍋爐MFT動作。
(2)案例2:某600MW火電機組凝結(jié)水泵變頻器過負荷跳閘導(dǎo)致機組非停。2016年12月17日,某600MW火電機組A凝結(jié)水泵變頻器運行,B凝結(jié)水泵備用,機組負荷為463.07MW。當(dāng)日12:30,運行操作A凝結(jié)水泵變頻器增負荷;當(dāng)日12:31:11,變頻器輸出指令為93.41%,輸出電流為178.23A,21s后,變頻器輸出指令為99.71%,輸出電流為207.22AA并維持穩(wěn)定;當(dāng)日12:33:15,變頻器過載保護動作跳閘,B泵聯(lián)啟不成功,機組因凝結(jié)水失去而被迫停運。
(3)案例3:某300MW火電機組引風(fēng)機跳閘導(dǎo)致機組非停。2013年9月25日,某300MW火電機組電負荷為260.9MW。當(dāng)日4:28:42,B引風(fēng)機因軸承溫度高而跳閘,機組RB動作,4A引風(fēng)機動葉指令由55.4%上升到100%,4A引風(fēng)機電流由165.2A升高到482,過流保護動作,2臺引風(fēng)機全停,觸發(fā)鍋爐MFT。對案例中電動機過負荷情況、電動機定子線圈溫升情況、電動機過負荷保護定值整定情況進行統(tǒng)計分析,見表1。
表1 電動機過負荷及定子線圈溫度統(tǒng)計
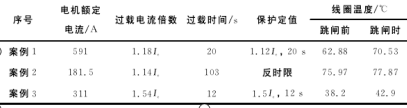
案例1、案例2均為電動機加載過程導(dǎo)致電動機過負荷,案例3為B引風(fēng)機跳閘導(dǎo)致4A引風(fēng)機過載。現(xiàn)場所用電動機的絕緣耐熱等級為F級,溫升按B級考核,即電動機的允許溫度為130℃,繞組溫升限值為80K。由表1可知,3臺電動機跳閘時的定子線圈溫度都遠未達到電動機線圈溫度限值。案例中,電動機過負荷保護定值的取值原則均符合DL/T 1502-2016《廠用電繼電保護整定計算導(dǎo)則》的要求,跳閘時電動機的定子線圈溫度均在電動機正常允許范圍內(nèi),定子線圈的溫升也在**范圍內(nèi),遠未達到電動機的過負荷能力限值。
4 三相異步電動機定子繞組過負荷的保護配置及定值設(shè)置建議
現(xiàn)有規(guī)程在電動機過負荷保護定值選取中,多考慮保護電動機**,未充分考慮負荷特性和釋放電動機本身的過負荷能力。為此,應(yīng)合理設(shè)置電動機加載速率,在控制系統(tǒng)中設(shè)置適當(dāng)?shù)南拗浦担@是防止電動機過流、過載的根本措施。但是,系統(tǒng)需求或系統(tǒng)工況復(fù)雜,導(dǎo)致的電動機過負荷情況不一定能完全避免,因此在電動機保護配置及定值計算時,除需考慮軸承損壞導(dǎo)致過負荷等電動機自身原因外,還要考慮系統(tǒng)或負載原因?qū)е碌碾妱訖C過負荷。系統(tǒng)中某些重要電動機,一旦跳閘將直接導(dǎo)致機組非停,經(jīng)濟損失巨大,因此針對重要電動機的過負荷保護配置及定值選取,提出以下改進建議。
4.1應(yīng)充分考慮電動機負荷特性及在系統(tǒng)中的地位,按二段原則配置電動機過負荷保護
應(yīng)充分考慮電動機負荷特性及其在系統(tǒng)中的地位,重要電動機的過負荷保護按二段配置,一段保護動作于信號,提醒運行人員注意,另一段保護出口跳閘。在保證電動機**的前提下,盡量放開電動機的過負荷能力,延遲另一段保護出口跳閘的時間,給運行人員爭取
調(diào)整的時間,避免機組非停,減少損失。
定子繞組過負荷一段保護定值可取1.05倍電動機額定電流,動作時間可適當(dāng)取短,按躲過電源波動整定,可取3~5s,保護動作于信號。信號應(yīng)上傳至主控室,提醒運行人員注意并及時做出調(diào)整。
定子繞組過負荷另一斷保護可采用定時限或反時限動作曲線,按躲過定子繞組過負荷能力整定,動作于跳閘。反時限動作曲線貼近電動機定子繞組的過負荷能力,簡單的電動機運行期間過載保護動作模型:

式中,t為保護動作時間;τ為電動機定子線圈熱容量系數(shù);I*為以電動機額定電流為基準(zhǔn)的標(biāo)幺值;Ksr為散熱系數(shù),可取1.05~1.1。
動作曲線的啟動門檻可取1.05~1.1倍電動機額定電流,熱容量系數(shù)τ的取值應(yīng)由電動機廠提供,或參照導(dǎo)則,根據(jù)電動機的熱限曲線、過負荷能力、允許堵轉(zhuǎn)電流及時間或啟動電流下的定子溫升進行估算。
定子繞組過負荷若按定時限保護配置,則保護電流動作值可按1.5~2.2倍電動機額定電流整定,動作時間按躲過電動機廠家提供的電動機過負荷能力整定,保護動作于跳閘。
4.2 優(yōu)化電動機過負荷保護邏輯,增設(shè)定子繞組溫度輔助判據(jù)
為保證電動機的**,可在電流型電動機過負荷保護的基礎(chǔ)上,引入電動機定子線圈的溫度作為輔助判據(jù)。當(dāng)電動機過負荷保護動作,且電動機定子線圈溫度超過限值時,保護出口跳閘。
4.3配置電動機熱過載保護并合理設(shè)置保護定值
微機電動機綜合保護通常配置電動機熱過載保護。熱過載保護的模型,綜合考慮了電動機正序電流及負序電流對電動機發(fā)熱的不同影響,以及電機冷態(tài)、熱態(tài)、散熱等工況。應(yīng)根據(jù)電動機廠家提供的電動機熱限曲線或過負荷能力,合理設(shè)置電動機熱過載保護定值并投入運行,是對電動機過負荷的有效保護手段。
5安科瑞智能電動機保護器介紹
5.1產(chǎn)品介紹
智能電動機保護器(以下簡稱保護器),采用單片機技術(shù),具有抗干擾能力強、工作穩(wěn)定可靠、數(shù)字化、智能化、網(wǎng)絡(luò)化等特點。保護器能對電動機運行過程中出現(xiàn)的過載、斷相、不平衡、欠載、接地/漏電、堵轉(zhuǎn)、阻塞、外部故障等多種情況進行保護,并設(shè)有SOE故障事件記錄功能,方便現(xiàn)場維護人員查找故障原因。適用于煤礦、石化、冶煉、電力、以及民用建筑等領(lǐng)域。本保護器具有RS485遠程通訊接口,DC4-20mA模擬量輸出,方便與PLC、PC等控制機組成網(wǎng)絡(luò)系統(tǒng)。實現(xiàn)電動機運行的遠程監(jiān)控。
5.2技術(shù)參數(shù)
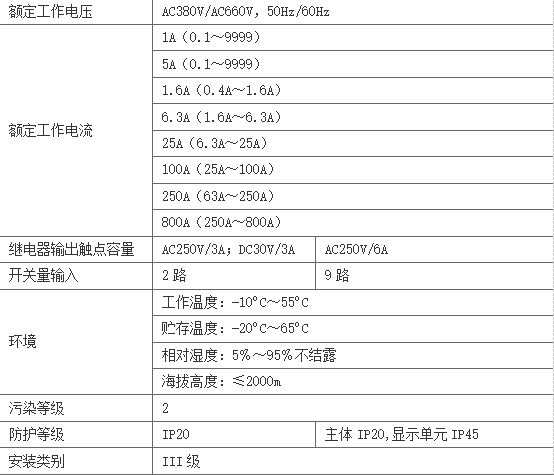
5.2.1數(shù)字式電動機保護器

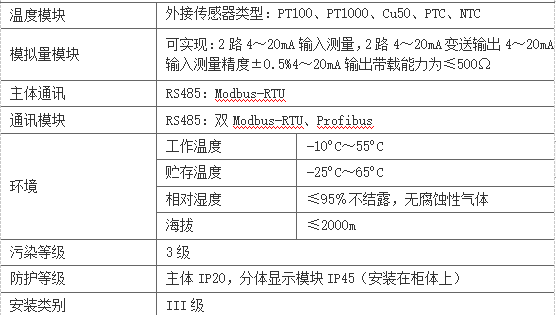
5.2.2模塊式電動機保護器

5.3產(chǎn)品選型

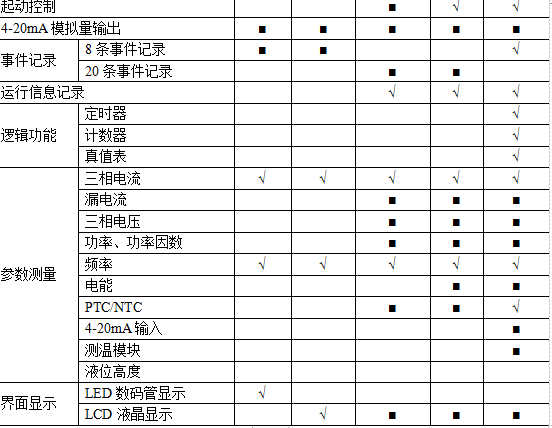
說明:“√”表示具備,“■”表示可選。
6結(jié)束語
重要電動機的過負荷保護應(yīng)充分考慮電動機負荷特性,充分釋放電動機過負荷能力,按躲過電動機過負荷能力整定,不宜太靈敏。電動機的過負荷保護按二段配置,一段發(fā)信號,信號應(yīng)發(fā)至主控室提醒運行人員及時調(diào)整;另一段動作于跳閘,跳閘段定值按躲過電動機過負荷能力整定。反時限動作曲線貼近電動機定子繞組的過負荷能力,采用反時限動作曲線可為電動機提供合理的保護,同時可將電動機定子繞組溫度作為電動機過負荷的輔助判據(jù),兩者均滿足條件時啟動跳閘。投入并合理設(shè)置電動機熱過載保護是保護電動機過負荷的有效手段。
參考文獻
[1] DL/T 684-2012大型發(fā)電機變壓器繼電保護整定計算導(dǎo)則[S].
[2] 于愛民,宋 巖.三相異步電動機過負荷保護的配置及定值設(shè)置分析
[3] 安科瑞企業(yè)微電網(wǎng)設(shè)計與應(yīng)用手冊.2020.06版
作者簡介:張娟,女,安科瑞電氣股份有限公司,主要研究方向為智能電網(wǎng)供配電,QQ:2880635303 郵箱:2880635303@qq.com
